
原始檔案與未來教學更新資訊可於Patreon取得
您可於Twitter上追蹤我
本文屬於遊戲數學系列文
Here is the original English post
本文之英文原文在此
前備教學
大綱
我們已經認識了三個基礎三角函數:正弦、餘弦、與正切。現在我們要來看看它們的反函數、以及如何將其利用於遊戲開發。
你將可透過本教學學會:
- 三個基礎三角函數的反函數
- 如何從給定的斜率算出斜坡的角度
- 反三角函數的定義域與值域
- 特殊的方便反三角函數atan2
- 如何使物件面相滑鼠游標
反函數
一個函數能被視為一個黑盒子,能夠將給定的輸入值轉換成特定的輸出值。若一個函數 能將輸入值
能將輸入值 轉換為輸出值
轉換為輸出值 ,我們便將其寫成
,我們便將其寫成 (唸做y equals f of x)。若一個函數能將的輸出值當作輸入值,而給出的原始輸入值作為輸出值,我們便稱該函數為的反函數,寫成
(唸做y equals f of x)。若一個函數能將的輸出值當作輸入值,而給出的原始輸入值作為輸出值,我們便稱該函數為的反函數,寫成 (唸做 f inverse)。
(唸做 f inverse)。
換句話說,若對一個函數輸入而得到 (寫作),那麼便可對反函數輸入而得到 (寫作 )。
)。
舉例來說,一個將輸入值加一的函數,其反函數為一個將輸入值減一的函數。讓我們將前者寫成 ,然後後者寫成
,然後後者寫成 。若我們將
。若我們將 輸入到,便可算得:
輸入到,便可算得:

當我們把 的輸出值
的輸出值 反輸入到
反輸入到 ,我們則可得到一開始的:
,我們則可得到一開始的:

反三角函數
我們已經知道三角函數的輸入值是角的大小,然後其輸出值是個實數。若將三角函數的輸出值作為輸入值餵入它們的反函數,反函數將會輸出原本三角函數輸入的角(單位為弳度)。舉例來說,已知 ,於是可得
,於是可得 。
。
反三角函數有特殊的名字。 (反正弦)不是唸做sine inverse,而是唸做arcsine。同樣地,
(反正弦)不是唸做sine inverse,而是唸做arcsine。同樣地, (反餘弦)和
(反餘弦)和 (反正切)分別唸做arccosine和arctangent。於Unity中,呼叫反三角函數的方式如下:
(反正切)分別唸做arccosine和arctangent。於Unity中,呼叫反三角函數的方式如下:
float sinAngle = Mathf.Asin(sinValue); // arcsine float cosAngle = Mathf.Acos(cosValue); // arccosine float tanAngle = Mathf.Atan(tanValue); // arctangent
斜坡角度
現在來看個簡單的範例。給定遊戲場景中一斜坡的垂直變量和水平變量,要如何算出斜坡的角度?畫成以下的示意圖,又如何從垂直變量 和水平變量
和水平變量 算出角度
算出角度 ?
?
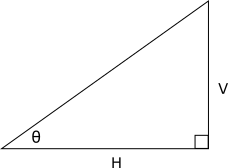
目標是用和表達。首先,我們可用正切函數寫出與和之間的關係:

接著,我們便可藉由將 輸入
輸入 來取得:
來取得:

從另一個角度來看,上述等式可以看成是更之前的等式兩邊值各輸入反正切函數的結果。一般來說, 會相消成,而
會相消成,而 則會相消成。
則會相消成。
的單位為弳度。如同先前的教學所提到,可以將其乘上 以把單位轉換為角度。
以把單位轉換為角度。
於是,現在我們可以做個簡單的互動程式,讓使用者移動一個點,該點與原點形成一個斜坡,並且用該點的座標 計算斜坡的角度。
計算斜坡的角度。
這是程式碼:
Vector3 point = p.transform.position; // compute slope angle in radians float angleRad = Mathf.Atan(point.y / point.x); // convert to degrees // Mathf.Rad2Deg is a constant equal to 180.0f / Pi float angleDeg = angleRad* Mathf.Rad2Deg; text = angleDeg + "°";
定義域與值域
使用反三角函數時,了解其定義域(domain)與值域(range)是非常重要的。
一個函數的定義域是所有有效輸入值的集合,而其值域則為所有可能的輸出值的集合。
舉例來說, 的定義域為所有實數,因為任何角度都能作為其輸入值。而的值域則為
的定義域為所有實數,因為任何角度都能作為其輸入值。而的值域則為![[-1, 1]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-96395345c57f8928c42918c656dd1364_l3.png "Rendered by QuickLaTeX.com") ,這個表示式代表涵蓋介於-1和1之間所有值的集合,並包含邊界值-1與1。若該表示式使用的是小括弧而非中括胡,則表示邊界值不包含在該集合內。例如
,這個表示式代表涵蓋介於-1和1之間所有值的集合,並包含邊界值-1與1。若該表示式使用的是小括弧而非中括胡,則表示邊界值不包含在該集合內。例如 表示涵蓋介於0與10之間所有值的集合,並包含邊界值0,但不包含邊界值10。
表示涵蓋介於0與10之間所有值的集合,並包含邊界值0,但不包含邊界值10。
反函數的定義域與值域分別就是其對應函數的值域和定義域吧?對反三角函數來說,事實並非如此。
三角函數是週期函數,這表示不同的輸入值可以對應到同一個輸出值。對正弦函數與餘弦函數來說,甚至同一個週期內的不同輸入值也有可能對應到同一個輸出值。
讓我們再用作為範例, 與
與 的輸出值都是1,所以
的輸出值都是1,所以 的輸出值是什麼?輸出值不可能同時等於
的輸出值是什麼?輸出值不可能同時等於 、
、 、或任何能夠讓輸出1的輸入值。事實上,反三角函數值域已被選定為特定的公認有限範圍。
、或任何能夠讓輸出1的輸入值。事實上,反三角函數值域已被選定為特定的公認有限範圍。
與 的值域皆為,所以
的值域皆為,所以 與
與 的定義域皆為。與的值域則分別被選定為
的定義域皆為。與的值域則分別被選定為![[\frac{-\pi}{2}, \frac{\pi}{2}]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-9774586f3753f3cf9ff0dc4a325ab8c8_l3.png "Rendered by QuickLaTeX.com") 與
與![[0, \pi]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-2a4bfe6466ef28b78e984d6d1442a1ba_l3.png "Rendered by QuickLaTeX.com") ,這些值域涵蓋
,這些值域涵蓋 弳(或180度)的角範圍。
弳(或180度)的角範圍。
所以的輸出值為,這是於範圍內,唯一能輸入並得到1的角度。
接著來看 ,由於
,由於 的值域為所有實數的集合,的定義域即為所有實數的集合。而的值域則被選定為,與的值域相同。
的值域為所有實數的集合,的定義域即為所有實數的集合。而的值域則被選定為,與的值域相同。
方便的Atan2函式
假設於2D平面上有個點 且其位於第一象限內,意即
且其位於第一象限內,意即 且
且 。另外,令為介於
。另外,令為介於 軸與連接原點與
軸與連接原點與 的線段之間的角。
的線段之間的角。
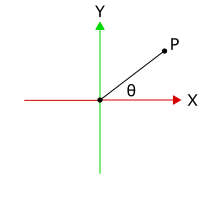
我們知道 所以我們可以用反正切函數和的座標算出:
所以我們可以用反正切函數和的座標算出: 。因為
。因為 和
和 皆為正數,便會位於
皆為正數,便會位於![[0, \frac{\pi}{2}]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-d1fd87d1f660fa4bc822942855f1726f_l3.png "Rendered by QuickLaTeX.com") 範圍內,也同時被包含在較大的反正切函數的值域
範圍內,也同時被包含在較大的反正切函數的值域![[-\frac{\pi}{2}, \frac{\pi}{2}]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-7acc7e9164fd8c9bce79d25371045b45_l3.png "Rendered by QuickLaTeX.com") 之中.
之中.
上述計算的程式碼如下:
float angle = Mathf.Atan(p.y / p.x);
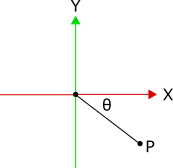
那麼如果位於第四象限,意即和 ,又會如何?
,又會如何? 成為負數,而
成為負數,而 則會輸出個負角,位於
則會輸出個負角,位於![[\frac{-\pi}{2}, 0]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-1f29f195f2dea4f7e5d0cfb2b3fcef74_l3.png "Rendered by QuickLaTeX.com") 範圍內,也同時被包含在較大的反正切函數的值域之中。
範圍內,也同時被包含在較大的反正切函數的值域之中。
但當位於第二或第三象限的時候,問題就來了。若位於第二象限,也就是 且,比例便是負的。於第二象限中,我們能夠找到一個點
且,比例便是負的。於第二象限中,我們能夠找到一個點 使得比例
使得比例 值相等於第四象限一點
值相等於第四象限一點 的座標比例
的座標比例 。符合此條件的點配對滿足等式
。符合此條件的點配對滿足等式 。
。
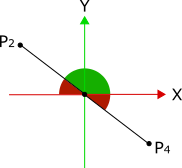
下圖中的兩點 與
與 有著相同的座標比例
有著相同的座標比例 。
。
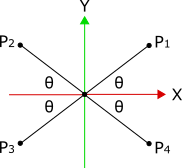
於上圖中,可以看到第一象限中的點 與第三象限中的點
與第三象限中的點 ,它們的座標比例與和的座標比例只差在正負號。所有介於連接原點與各點的線段與X軸所夾之絕對銳角(小於90度之角)都相等。
,它們的座標比例與和的座標比例只差在正負號。所有介於連接原點與各點的線段與X軸所夾之絕對銳角(小於90度之角)都相等。
座標比例值等同於 ,也等同於。所以,若我們將傳入反正切函數,其輸出值相會等同於
,也等同於。所以,若我們將傳入反正切函數,其輸出值相會等同於 之輸出值,因為位於第四象限的角位於反正切函數的值域內,而位於第二象限的角則在值域外。
之輸出值,因為位於第四象限的角位於反正切函數的值域內,而位於第二象限的角則在值域外。
當我們將輸入反正切函數時,我們真正想要得到的是下圖中的綠色正頓角(大於90度的角),而非紅色的負銳角。算角度的時候,一般都是從+X方向開始計算。
欲達此目的,我們須將在合併 與
與 成為單一比例值傳入反正切函數以前,檢查與 各自的正負號。然後,若角並非位於反正切函數的值域內,我們便修正反正切函數的輸出值,使其位於正確的象限內。以下是如此修正角度的程式碼:
成為單一比例值傳入反正切函數以前,檢查與 各自的正負號。然後,若角並非位於反正切函數的值域內,我們便修正反正切函數的輸出值,使其位於正確的象限內。以下是如此修正角度的程式碼:
// range of this function is (-pi, pi]
float FixedUpAtan(float py, float px)
{
if (px > 0.0f) // normal, no fix-up needed
{
// "normal"
// py > 0.0f : first quadrant
// py < 0.0f : fourth quadrant
return Mathf.Atan(py / px);
}
else if (px < 0.0f) // fix-up needed
{
if (py > 0.0f) // second quadrant
return Math.PI + Mathf.Atan(py / px);
else if (py < 0.0f) // third quadrant
return -Math.PI + Mathf.Atan(py / px);
else // angle on negative X axis
return 2.0f * Mathf.PI;
}
else // infinity
{
if (py > 0.0f)
return 0.5f * Mathf.PI; // ratio is positive infinity
else if (py < 0.0f)
return -0.5f * Mathf.PI; // ratio is negative infinity
else
return 0.0f; // degenerate input (the origin)
}
}
這程式碼看起來有點分量,不過幸運的是,幾乎任何程式語言的標準數學函示庫內都已經有個方便的atan2函數,其值域![(-\pi, \pi]](http://allenchou.net/wp-content/ql-cache/quicklatex.com-1a2076e8b5cb430a7530c947d8828532_l3.png "Rendered by QuickLaTeX.com") 涵蓋完整的360度,且該函數就是在做上述的角度修正(並且幾乎肯定是用更加有效率且優化的方式計算)。注意上述程式碼中,傳入的參數順序為Y先X後,不同函式庫的atan2函數參數順序可能有所不同,不過就我所看過的大部分都是Y先X後。
涵蓋完整的360度,且該函數就是在做上述的角度修正(並且幾乎肯定是用更加有效率且優化的方式計算)。注意上述程式碼中,傳入的參數順序為Y先X後,不同函式庫的atan2函數參數順序可能有所不同,不過就我所看過的大部分都是Y先X後。
我常常看到一個對atan2函數的誤解,說它只是反正切函數的另外一個替代方案,與正切函數提供的功能沒有差異,這其實是錯的。反正切函數只接受單一輸入值,並且其值域為只涵蓋180度的。而atan2函數接收兩個輸入值(與在被結合為單一比例值之前),並且其值域涵蓋了完整的360度。
使物件於3D空間中面相滑鼠游標
最後,讓我們來看看一個經典範例:使物件面向滑鼠游標。
首先,找出滑鼠游標下的射線(ray)與代表地面的平面(plane)之交點。然後,將一個物件定位於該交點,做出該物件於3D空間中跟著滑鼠游標移動的效果。這個物件就是我們的面相目標。
Camera cam = Camera.current; Vector3 mouse= Input.mousePosition; Ray ray = cam.ScreenPointToRay(mouse); float rayDist; plane.Raycast(ray, out rayDist); sphere.position = ray.GetPoint(rayDist);
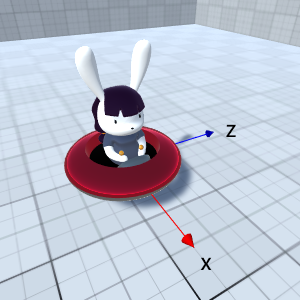
接下來,讓我們再度使用彈彈特效工具包中的熟面孔:幽浮兔。當沒有被套用任何旋轉的時候,她的正面是+X方向,而她的左邊則是+Z方向。最終目標是要讓她的正面面向目標。
以幽浮兔為原點,計算面向目標相對於她的座標:
Vector3 coord = sphere.transform.position - ufoBunny.transform.position;
現在來將X軸與連接幽浮兔和面向目標的線段之間的角度標記為:
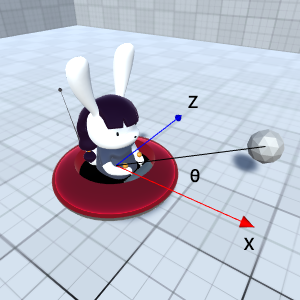
我們之前已經看過,在這情況下要如何計算了,使用方便的atan2函數:
float thetaRad = Mathf.atan2(coord.z, coord.x); // in radians
現在回顧一下這張圖:
圖中的是XY平面,隨著值增加,便會逆時針繞著原點旋轉。這個旋轉軸為+Z軸(之後的教學會有更詳細的解釋)。幽浮兔與面向目標位於XZ平面上,要將XY平面的計算轉換到XZ平面上,我們需要將+X軸對應到+X軸,+Y軸對應到+Z軸,而作為旋轉軸的+Z軸則對應到-Y軸。
現在我們有了旋轉軸與旋轉角度,我們終於可以建構代表該旋轉的四元數(quaternion)。未來將會有專門介紹四元數的教學,當下我們只需要知道四元數是Unity用來表示物件旋轉的資料格式。
float thetaDeg = thetaRad * Mathf.Rad2Deg; // in degrees float axis = Vector3.down; // (0, -1, 0) == -Y axis Quaternion rot = Quaternion.AngleAxis(thetaDeg, axis); ufoBunny.transform.rotation = rot;
這是最終結果:
註:Unity本身已提供如Quaternion.LookRotation與Transform.LookAt等輔助函式,能用來達到相同的效果。不過,本教學的目的在於幫助理解反三角函數。
總結
透過本教學,我們認識了反三角函數、它們與其相對應的三角函數之間的關係、以及它們的定義域與值域。
另外,我們知道了反正切函數的值域並沒有涵蓋完整的360度範圍,而atan2此方便函數的值域則有涵蓋360度範圍。
最後,我們學會了如何使用atan2函數製作經典的使物件面相滑鼠游標的效果。
若您喜歡這篇教學,請考慮到Patreon支持我。感謝!
